
This Article From Issue
March-April 2012
Volume 100, Number 2
Page 120
DOI: 10.1511/2012.95.120
It’s common for roboticists to take design inspiration from living creatures, but such biomimetic machines are usually modeled on animals with skeletons, either internal ones like those of humans or external shells like insects have. But chemist George Whitesides and his colleagues at Harvard University think soft-bodied organisms—such as squid, starfish and worms—have been overlooked for too long. The researchers have created prototype “soft robots” that can fill niches where no hard body could go.
Ad Right
The robots are fabricated using a technique that Whitesides pioneered, called soft lithography. The name is taken from photolithography, the manufacturing process used to make most electronic components. Light shines through a patterned mask to expose a thin polymer film, and the regions not in the desired pattern can then be dissolved away. “It’s a fantastically successful technology, it’s capable of going to very high resolution and very small features, and it’s also fantastically expensive,” says Whitesides.
In soft lithography, instead of using light, the team makes a mold that they cast in a soft polymer, a much simpler and relatively inexpensive fabrication process. “We either use the flat surface of that casting to print, or we seal its recessed surface to make channels,” says Whitesides. The channels have been used for microfluidics, networks that pump around chemical reagents for purposes such as a DNA analysis. Whitesides and his group made the conceptual leap from pumping fluid to creating locomotion. “We take that channel structure and pump air into it, which means it bends and twists and makes the elements of a robot,” Whitesides says.
The limbs and trunk of the robot are molded with an internal pattern of chambers that looks a bit like a simplified snowflake—a central “backbone” channel with tubes branching off from either side. The robot is made of two polymer layers, one that stretches a lot, and one that is firmer. When air is pumped into the limbs, the chambers in the stretchy material expand like balloons, but the firmer material does not stretch, so the limb curls up around the nonexpanding side. Frictional forces with the ground create lateral push from the back side of the limb as it curls, so the whole structure bends forward away from the expanding balloons. With a clever sequence of limb actuation, the robot can creep its way along.
“It’s not an elaborate concept, but the kind of motion you can achieve this way is really pretty remarkable,” says Whitesides. “You get very interesting movements in these limbs with very simple actuation and control.” Whitesides points out that although the motions and the body plan of the robot do resemble those of soft animals such as starfish, their aim is to mimic the function rather than the mechanism.
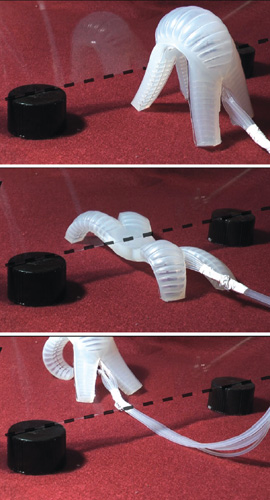
Photo courtesy of Robert F. Shepherd.
As the researchers report in the December 20 issue of the Proceedings of the National Academy of Sciences of the U.S.A., so far the robot has two main gaits: a wavelike undulation and a lurching crawl. Each limb is inflated and controlled separately to create the movement sequence. By combining the gaits, the team was able to demonstrate a capability that a hard-bodied robot would find rather difficult: squeezing under a very low barrier. The robot, about 0.9 centimeter tall when flattened, was able to get through a gap 2 centimeters high. The team first had the robot crawl up to the edge of the barrier. It then used a series of undulations, looking a bit like a breakdancer trying to limbo, to pass underneath.
The walking soft robot is about 13 centimeters long, and it achieves modest speeds—up to about 24 meters per hour. “If you think about worms and snails, they don’t really leap across the countryside,” says Whitesides. “So it’s not doing badly; it has about the speed of a starfish.”
There is no inherent physical limit to the size that the machines could be scaled up to, says Whitesides, and the team has already made models twice the size that can carry payloads. “If you want to carry sensors, you want something that has a little bit of oomph to it,” he says. The group has also made six-limbed devices that act as robotic grippers, which have successfully curled up to gingerly lift fragile objects, such as a raw egg.
Video courtesy of Robert F. Shepherd.
Whitesides thinks the gripper version of the robot could be a helpful surgical tool to delicately hold fragile tissues, particularly during laparoscopic procedures that use only a few small incisions. The walking robot is quite stable on uneven ground, making it potentially useful for search-and-rescue work in hazardous environments—an application of particular interest to the Defense Advanced Research Projects Agency, which sponsors the research. Because the robots are molded, they also have the potential to be cheap to produce. “They could crawl under and over rubble, even if it’s shifty and unstable,” says Whitesides. “And then if the roof falls in, you don’t care because after all they’re not very expensive to begin with.”
Larger versions of the soft robot could be untethered, carrying their own compressors. But Whitesides points out that the majority of robots in use today remain wired, and that tethers can be useful, for example to carry an optical fiber for video transfer. “There is still a lot to be done; this is the module-zero version of the new technology,” he says. “But we think of these things as being less structures that go off entirely on their own, and more ones that are going to be assistants to people.”

American Scientist Comments and Discussion
To discuss our articles or comment on them, please share them and tag American Scientist on social media platforms. Here are links to our profiles on Twitter, Facebook, and LinkedIn.
If we re-share your post, we will moderate comments/discussion following our comments policy.