Smart and Squishy Robots
By Yigit Menguc
Building robots that are entirely soft requires the development of new components from valves to circuits, as well as ways to control deformable arms.
Building robots that are entirely soft requires the development of new components from valves to circuits, as well as ways to control deformable arms.

In the 1920s, Czech playwright Karel Čapek gave us a vision of machines made from soft materials and molded, literally, in the image of humans. In his play R.U.R. (Rossum’s Universal Robots,) characters describe “mixers” for “dough” that is turned into robota using a “spinning-mill.” This artistic vision is now taking shape in labs and startups across the globe, with the development of machines that have soft structures. Unlike the electronics that make our phones smart and our internet searches fast, robots, like humans, are more than merely a mind. There is a growing understanding that what makes animals intelligent is the interaction among mind, body, and world. Ultimately, the ambitious dream of soft roboticists is to bring robots out of “rigid” environments and tasks, and into the big, messy world in which humans live and work.
All images courtesy of the author.
Many of my colleagues and I have chosen to take inspiration from one of the most alien mascots: the octopus. As soon as we take as our goal technology that is entirely soft, squishy, and stretchy, yet dynamic, agile, and intensely intelligent, we are forced to reevaluate what is possible. Every single electrical and mechanical component must be designed from scratch; nothing is available commercially. The very process of building machines must be entirely reimagined: How do you make an animal body when bolts and screws are verboten? And how will your robot know how to move? Industrial robots use rigid skeletons in imitation of human shoulder-arm-wrist linkages, so their movement can be described with simple geometric relations—for example, a linkage rotating through space about a fixed point creates a perfect circle. In contrast, soft robot arms, like octopus tentacles, are meant to stretch and squish at every point along their length. No clean geometric relations exist here.
Soft robot arms are meant to stretch and squish at every point along their length; their movement cannot be described with simple geometric relations.
Soft robots promise to fundamentally change the ways in which many areas of technology are implemented, but the most immediate effects will be seen in aquatic, industrial, and medical robots. Aquatic robotics includes inexpensive robots for exploration, maritime robots for inspection and welding, and stealthy naval surveillance robots. Soft industrial robot arms and hands will solve issues in warehouse logistics by making object handling feasible for robots operating alongside human coworkers. Medical applications include certain surgical tools (specifically endoscopes), and prosthetics or orthotics.
If the octopus serves as the lofty ideal that soft robots strive to emulate, then the ideal actuator is the muscle. This tissue is an exquisite transducer, turning energy directly into mechanical motion, as well as being self-assembling and self-healing. Perhaps the most significant shortcoming in current soft robot “muscles” is that the majority of the material used is rubber, which is entirely passive and dissipative of energy, thus acting purely as a damper at all times. New transducers that convert energy into mechanical motion and forces are a major avenue of effort. The goal is to match the uncontracted softness of biological muscle to achieve two novel capabilities: full-body shape-shifting like an octopus squeezing into a bottle, and tissue compliance-matching for wearable and surgical robots that function comfortably on or in humans.
Pressurized fluid is extensively employed in soft robot bodies because of its ease of application and inherent safety. Especially when using pneumatics, the working fluid is compressible and absorbs contact forces through deformations. The soft shell that encloses the working fluid is patterned to direct the uniform expansion of the pressure into the desired path. But to be precise, soft fluidic actuators are effectively transmission systems, not transducers. As such, all fluidic actuators require an additional component to convert potential energy (electrical or chemical) into mechanical energy in the form of fluid pressure. Another major system challenge in fluidic actuators is the use of valves, which are usually rigid. Each actuator must have at least one physical mechanism for controlling the flow of the fluid.

Chemical energy is an exciting prospect because of its energy density. The most common sources are hydrocarbons (methane and butane) that undergo combustion, or a monopropellent (a fuel that doesn’t require an oxidizer) undergoing catalytic decomposition (such as hydrogen peroxide catalyzed with platinum). The chemical processes of these two systems result in starkly contrasting performance metrics. Combustion is fast and generates large deformations, whereas monopropellent decomposition is slow and sustained. However, both fuel systems require additional mechanical architecture (valves, regulators, fuel tanks, and the like). There is enormous potential for new mechanical designs of soft robot–specific pumps meant to be embedded in soft bodies.
An especially hopeful novel system for generating pneumatic power from electricity is the proton exchange membrane. This semipermeable membrane, composed of ion-containing polymers called ionomers, can reversibly hydrolyze water into (or from) hydrogen and oxygen, which selectively increases or decreases pneumatic pressure. This system currently is slow, but it offers a tantalizing peek at what it would be like to have a direct pressure transducer with no moving parts.
In addition to needing power, soft robots also need soft fluidic control. The most obvious form of controlling fluid flow is by means of a mechanical valve that physically closes an open channel. The most ubiquitous control mechanism in soft microfluidics is called a Quake valve, which operates through the interaction of two microchannels placed in contact, so that the inflation of the first causes it to expand into and shut off the flow of the second. My colleagues used the time delay between pressurizing the first microchannel and shutting the second one to great effect recently to create a soft octopus that can rhythmically raise and lower its arms.
My group has similarly used valves as “soft logic” gates that imitate the information control behavior of electronic transistors. Our approach uses electrorheological fluids; these smart fluids change from liquid to solid in the presence of a strong electric field. Hence we can achieve valving control within a microchannel with no moving parts. However, if the entire logic circuit is to remain soft and stretchy, the electrodes that provide the large electric field must also be pliable. To solve this challenge, we used another smart material, liquid metal alloys. The alloys in question are based on gallium and indium, with an occasional addition of tin, and trace amounts of copper. These alloys remain in their liquid phase down to –10 degrees Celsius and are quite conductive compared with other stretchable composites (but are still about 20 times less conductive than copper). This combination of electrorheological fluids, liquid metal, and rubber microchannels makes for an electronically controllable valve that can serve as the heart of soft logic circuits. Excitingly, if we perfuse the soft muscles of a robot with this combination of smart fluids, we have something more than a mere valve; we also have a system for changing the stiffness of the muscle—and the result is much like a real muscle tensing isometrically to absorb impacts.

In the search for an alternative to transducers for generating fluid pressure, research is in progress regarding the direct conversion of chemical or electrical energy into mechanical force and motion. Such artificial muscles are a research field in their own right, and that field is progressing independently of soft robotics. Artificial muscle materials have a few classes; the most well-developed category is electroactive polymers, of which dielectric elastomer actuators, DEAs, and ionic polymer-metal composites, IPMCs, are the classic cases. The operating principle of DEAs is based on deformation in a soft dielectric material due to electrostatic attraction of two electrodes arranged as a pair of parallel plates. IPMCs operate by an induced swelling within a gel due to ionic mass transport under an electric field gradient. Electroactive polymers are exciting because they can potentially be made fully soft and can achieve massive deformations, but my soft robotics colleagues rarely use them. Their reluctance seems to be due to several challenges: The materials are difficult to fabricate, fragile, and weak, and they require significant infrastructure.
There are also classes of exotic new actuating materials. To me, the most enticing are those that grow biological muscle directly onto soft scaffolds. However, the resulting muscle fibers are not nearly as complex and capable as naturally grown muscle is. An alternative technique is to reinvent muscle from the basic building blocks, by creating synthetic bundles of actin and myosin, the proteins at the core of all muscles. Myosin is a polymer molecule that locomotes along actin polymer microfibrils, and some early results seem to indicate that it is possible to synthesize mimics of both key polymers; however, extreme conditions of temperature, pressure, and acidity are required.
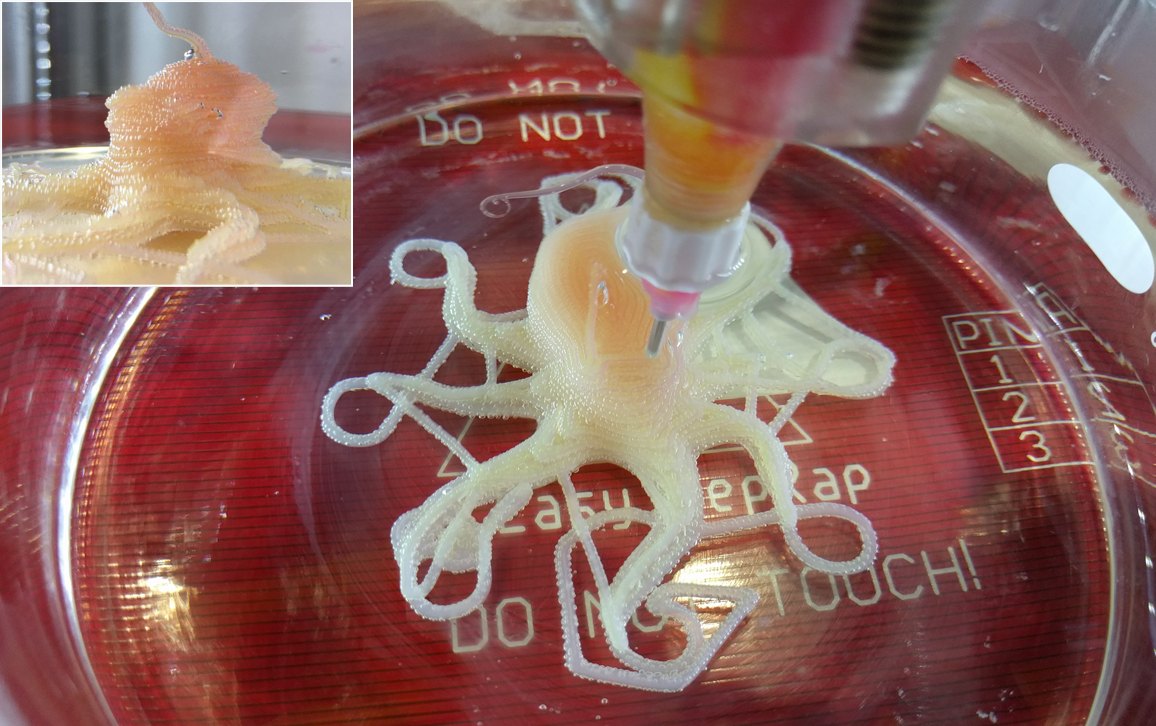
Improved capabilities for direct 3D printing of soft materials are needed to meet the challenges of fabricating soft devices. There has been some initial success at printing strands of silicone elastomer for synthetic spider webs, soft sensors, and actuators with limited deformation capacity. Despite the considerable potential of soft robots, they remain difficult to actually build through laboriously hands-on processes, including molding. To address the difficulty in creating stretchy machines, researchers have investigated additional techniques for printing liquid metals, biomaterials, and even textiles, but no work to date has specifically addressed the possibility of applying new techniques to existing 3D printing technology to create stretchy materials.
When we perfuse the artificial muscles of a soft robot with a combination of smart fluids, we have a system for changing the stiffness of the material, much like a real muscle tensing.
Multimaterial 3D printing, as a mode of fabrication, is the closest artificial technique to the layer-by-layer growth exhibited in biological fabrication. To date, the research related to multimaterial printing has focused on new manufacturing processes, such as coaxial extrusion (which uses concentrically nested nozzles) and multiple printheads. Different mixtures of inks—created using additives, optimized mixing heads, or particle-infused composites—can result in new material capabilities (such as embedded features and spanning gaps in the printed object) or improved strength. Control of the deposited ink properties through additional physical properties, such as magnetism, enables selective local property selection of the printed object.
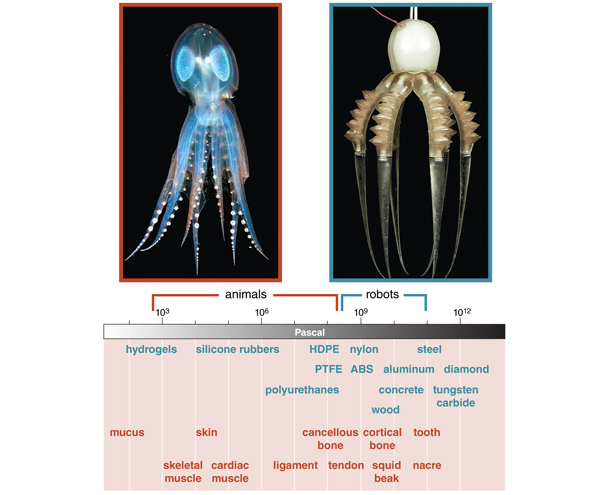
Biological examples show that changing the physical pattern of a material, rather than its composition, can by itself alter properties from hardness to toughness to stretchiness. Patterns are also present between materials of significantly distinct compliance. The tissues connecting bone to tendon within the human body represent a large stiffness gradient spanning two orders of magnitude; this gradient is achieved through the structural alignment and mineralization density of collagen fibers. Similarly, in octopus and squid, the rigid beak connects to the soft body through a transition spanning three orders of magnitude, achieved with structural alignment and protein-bonding density of chitin fibers. Most researchers’ efforts to mimic such patterned materials have focused primarily on small-deformation elements, or have resulted in discretized approximations of the continuum gradients seen in the biological examples. In contrast, mammalian skin is extremely stretchy and tear resistant, primarily as a result of the curled and weave-like pattern of fibers of collagen. In all of these disparate examples, the fibrous material structure serves to trap a propagating crack, thereby significantly increasing the total energy required to rupture, and thus increasing the toughness. New technologies can allow us to control both structure and material properties, increasing toughness while decreasing brittleness.
Leveraging the full spectrum of material mixtures available in multimaterial 3D printing, however, still requires controlling the patterns themselves at a level analogous to that of pointillist paintings and half-tone printing in newspapers. Ultimately, controlling the modes of microstructural patterning in bioinspired modes of cellular solids can result in fundamental elasticity control. There is also evidence that scaling down fiber diameters results in improved strength characteristics in a variety of biological and synthetic materials. However, to achieve this kind of precise patterning with 3D printing is going to require improved control of fabrication errors at small scales.
Octopus morphology and behavior have inspired soft robot actuation and control. The nature of soft materials interacting with hydrodynamics in certain octopus-robots has resulted in convincingly mimetic actions of dynamic arm “whipping.” Similarly, introducing stiff steel wire into a soft robot arm has enabled a “pseudo-joint”’ action for walking in the style of an octopus.
From a biological perspective, it is challenging to understand how the octopus generates its stereotypical motions without appropriate material models. Slight parametric variability in coefficient of drag or buoyancy can dramatically alter the apparent simulated behavior of the kinematics of the octopus arm in models, so precise experiments are required to characterize the real arm. Even so, observations of octopus reaching actions seem to indicate that a pair of parameters is commanded by the animal itself to control the soft arm, which otherwise has infinite degrees of freedom. Interestingly, it has been shown that the octopus controls the reaching kinematics with a peripheral neural network physically located in the arm itself. Motion can be broken down into its component positions, called motion primitives, by observing complex torsion motion of the arm—a stereotyped motion that would be used to, say, unscrew the lid of a jar. Biological experimental results from earlier this year also show that the octopus walks without a centrally generated rhythm, selecting the most convenient arms to recruit for locomotion in any direction at any given moment. Octopus motion primitives have been applied to soft robot kinematics either through direct imitation with fitted controls or through mechanical preprogramming. But the dream is to recreate octopuslike dynamic motion that permits simplified control effort.
Electrorheological (ER) fluids enable distributed valving and variable stiffening in hydraulic robots. These fluids were first observed as a fibrous microstructure emerging within suspensions of conductive particles within a dielectric liquid in response to applied electric fields. The electroactive behavior of this class of smart fluids has since been investigated to understand the shear flow response and how the induced fibrous microstructures evolve with increasing applied fields. Long, thin valves produce the best response, with fluid-to-solid transitions achieved in less than 10 milliseconds, implying that hydraulic valves opening and closing at rates of 100 hertz are possible with ER fluids and no moving parts.
The use of ER fluids in soft robotics first manifested as material stiffness control in the squishy pads of anthropomorphic fingers. In these early devices, the ER fluid only provided variable rheology to increase damping of impact and distribute the contact force. Mobile electrodes within an ER fluid enable selective stiffening of different regions of the fluid within the body of a robot. The distributed mobile electrode can then be leveraged to create variable stiffness joints in otherwise rigid robot mechanisms. Coupling ER variable damping joints with pneumatic actuation can improve dynamics and reduce steady-state oscillation, which will be significant in precision position control. Selective variable stiffening in fully soft actuators has already proven useful in making it possible to apply more force during manipulation of heavy objects. However, demonstrations of stiffening have only been achieved by jamming granular media within the elastomer body, and have not been attempted yet using an electroactive fluid as the stiffening medium. Only in the past few years has ER fluid been utilized directly as the working fluid in wormlike and plant-root-inspired robots. Through all of these efforts, a clear potential exists for using ER fluid as a working fluid in soft robot actuation with both direct high-speed electroactive valving and distributed variable stiffening.
The two core challenges of soft robotics research are repeatability and comparison. Current methods rely heavily on hand crafting, in which skill and experience levels introduce significant variability that, in turn, affects the mechanical characteristics of a soft robot. Also needed are standards for the direct comparison of performance of robots and robotic subsystems. My colleagues and I have already identified one set of common metrics for actuator performance, and biologists have suggested performance parameters that match biological muscle in soft actuators. An intuitive measure is the elastic modulus of the robotic systems we develop, and this value gives a roadmap for achieving softness in our creations.
But the core issue in soft robotics is still that soft robots must prove their worth. Despite the arguments for using them in industrial settings, the winning teams in the most recent Amazon Picking Challenge relied solely on traditional rigid arms and hands. One pioneering industrial soft robot company, which had early success and received significant media coverage, recently announced that it is going out of business. I still believe soft robotics has fertile ground on which to expand, but the lessons of entrepreneurship show that we must demonstrate significant competitive advantage to successfully translate research findings into accepted social practice.
The core issue is that soft robots must prove their worth: They must demonstrate significant competitive advantage to translate research findings into social practice.
A primary contribution of softness is in reducing the computation needed to plan paths and interactions, because collisions are less costly and because the compliance of soft robots should lead to automatic completion of grasps. However, if computation and sensing become easier, there will be less need for built-in compliance. In a certain sense, soft roboticists are racing Moore’s law, and silicon has a half-century head start against silicone. The goal then is to make it cheap and easy to embed intelligence into the robot body, and I think that the first step toward that end is making it easier to produce soft robots. That image brings me back to the scene from Čapek’s play, and the vats of dough that will end up forming the soft, humanlike robot bodies. Hopefully the foundries and factories that will build soft robots will end up making a new world for automation.
Click "American Scientist" to access home page
American Scientist Comments and Discussion
To discuss our articles or comment on them, please share them and tag American Scientist on social media platforms. Here are links to our profiles on Twitter, Facebook, and LinkedIn.
If we re-share your post, we will moderate comments/discussion following our comments policy.